Recently, Professor Hua Lin’s research team has made significant progress in the field of robotic visual perception. Their latest study, titled “PAVM: Progressive and Adaptive Variance Minimization Algorithm for Robust Registration”, has been published in the prestigious international journal IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), which has an impact factor of 18.6. TPAMI is one of the most authoritative and influential journals in the fields of artificial intelligence and pattern recognition, leading cutting-edge research in computer vision, pattern recognition, and machine learning. It is also a CCF Class-A recommended journal by the China Computer Federation. The School of Automotive Engineering of Wuhan University of Technology and the Hubei Longzhong Laboratory are listed as the first and second affiliations, respectively. Wu Hao, a doctoral candidate, is the first author, and Professor Hua Lin and Professor Zhu Dahu serve as corresponding authors.
Professor Hua Lin’s team focues on the fundamental theories and key technologies of intelligent robotic manufacturing, with a series of original breakthroughs in areas such as vision-based measurement, compliant machining, and intelligent repair. Since 2020, the team has published more than 30 papers in leading domestic and international journals, including IEEE Transactions (such as TPAMI, TMECH, TASE, TIM), Journal of Manufacturing Systems, Robotics and Computer-Integrated Manufacturing, Science China, and Journal of Mechanical Engineering. Their research has received funding from the National Key R&D Program of China, the National Natural Science Foundation of China, and the Independent Innovation Fund of Hubei Longzhong Laboratory.
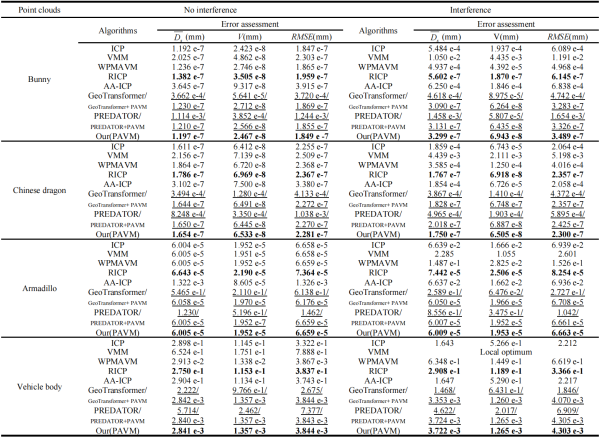
Table 1 compares the registration accuracy of different algorithms under normal and interference conditions, highlighting the robustness and accuracy advantages of PAVM.
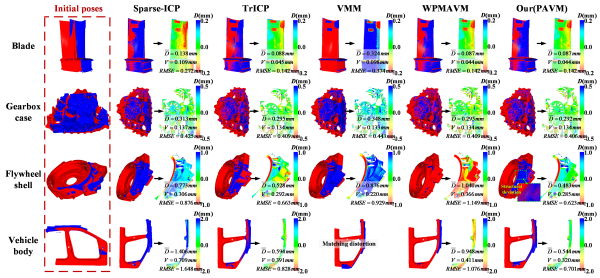
Figure 1 presents the registration results of point clouds from four types of complex components, demonstrating the stability and precision of PAVM under conditions with high interference and complex structures.
Original link: https://ieeexplore.ieee.org/document/11218730
Code link: https://codeocean.com/capsule/4399783/tree/v1
Written by: Zhu Dahu, Wu Hao
Rewritten by: Liang Muwei
Edited by: Li Huihui, Li Tiantian
Source: School of Automotive Engineering
|
|